Stable Proportional-Derivative Controllers
Abstract
In computer animation, a common technique for tracking the motion of
characters is the proportional-derivative (PD) controller. In
this paper, we introduce a new formulation of the PD controller that
allows arbitrarily high gains, even at large time steps. The key to our
approach is to determine the joint forces and torques while taking into
account the positions and velocities of the character in the next time step.
The method is stable even when combined with a physics simulator that uses
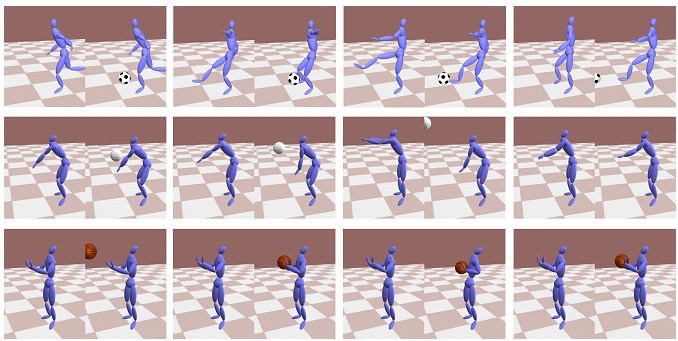
simple Euler integration. We demonstrate that these new, stable PD
controllers can be used in a variety of ways, including motion tracking in
a physics simulator, keyframe interpolation with secondary motion, and
constraint satisfaction for simulation.